Integrare pe părți- o metodă folosită pentru rezolvarea integralelor definite și nedefinite, când unul dintre integranți este ușor integrabil, iar celălalt este diferențiabil. O metodă destul de comună pentru găsirea integralelor, atât nedefinite, cât și definite. Semnul principal atunci când trebuie să îl utilizați este o anumită funcție constând din produsul a două funcții care nu pot fi integrate direct.
Formulă
Pentru a utiliza cu succes această metodă, trebuie să înțelegeți și să învățați formulele.
Formula de integrare pe părți în not integrala definita:
$$ \int udv = uv - \int vdu $$
Formula pentru integrarea pe părți într-o integrală definită:
$$ \int \limits_(a)^(b) udv = uv \bigg |_(a)^(b) - \int \limits_(a)^(b) vdu $$
Exemple de soluții
Să luăm în practică exemple de soluții de integrare pe părți, care sunt adesea propuse de profesori în timpul testelor. Vă rugăm să rețineți că sub simbolul integral există un produs a două funcții. Acesta este un semn că această metodă este potrivită pentru soluție.
| Exemplul 1 |
| Găsiți integrala $ \int xe^xdx $ |
| Soluţie |
|
Vedem că integrandul constă din două funcții, dintre care una, la diferențiere, se transformă instantaneu în unitate, iar cealaltă este ușor de integrat. Pentru a rezolva integrala, folosim metoda integrării pe părți. Să presupunem că $ u = x \rightarrow du=dx $ și $ dv = e^x dx \rightarrow v=e^x $ Înlocuim valorile găsite în prima formulă de integrare și obținem: $$ \int xe^x dx = xe^x - \int e^x dx = xe^x - e^x + C $$ Dacă nu vă puteți rezolva problema, trimiteți-ne-o. Vom oferi o soluție detaliată. Veți putea vizualiza progresul calculului și veți obține informații. Acest lucru vă va ajuta să obțineți nota de la profesorul dvs. în timp util! |
| Răspuns |
|
$$ \int xe^x dx = xe^x - e^x + C $$ |
| Exemplul 4 |
| Calculați integrala $ \int \limits_0 ^1 (x+5) 3^x dx $ |
| Soluţie |
|
Prin analogie cu exemplele rezolvate anterior, ne vom da seama ce funcție să integrăm fără probleme, pe care să diferențiem. Vă rugăm să rețineți că dacă diferențiam $ (x+5) $, atunci această expresie va fi convertită automat în unitate, ceea ce va fi în avantajul nostru. Deci facem asta: $$ u=x+5 \rightarrow du=dx, dv=3^x dx \rightarrow v=\frac(3^x)(ln3) $$ Acum toate funcțiile necunoscute au fost găsite și pot fi introduse în a doua formulă de integrare prin părți pentru o integrală definită. $$ \int \limits_0 ^1 (x+5) 3^x dx = (x+5) \frac(3^x)(\ln 3) \bigg |_0 ^1 - \int \limits_0 ^1 \frac (3^x dx)(\ln 3) = $$ $$ = \frac(18)(\ln 3) - \frac(5)(\ln 3) - \frac(3^x)(\ln^2 3)\bigg| _0 ^1 = \frac(13)(\ln 3) - \frac(3)(\ln^2 3)+\frac(1)(\ln^2 3) = \frac(13)(\ln 3 )-\frac(4)(\ln^2 3) $$ |
| Răspuns |
| $$ \int\limits_0 ^1 (x+5)3^x dx = \frac(13)(\ln 3)-\frac(4)(\ln^2 3) $$ |
Metoda integrării pe părți este utilizată în principal atunci când integrandul constă din produsul a doi factori de un anumit tip. Formula de integrare prin părți arată astfel:
Face posibilă reducerea calculului unei integrale date  la calculul integralei
la calculul integralei  , care se dovedește a fi mai simplu decât acesta.
, care se dovedește a fi mai simplu decât acesta.
Majoritatea integralelor calculate prin metoda integrării pe părți pot fi împărțite în trei grupe:
1. Integrale ale formei  ,
, ,
, , Unde
, Unde  - polinom,
- polinom,  – un număr diferit de zero
– un număr diferit de zero
În acest caz, prin  denotă un polinom
denotă un polinom 
 .
.
2. Integrale ale formei  ,
, ,
, ,
, ,
, , Unde
, Unde  – polinom.
– polinom.
În acest caz, prin  denota
denota  , iar restul integrand prin
, iar restul integrand prin  :
:
3. Integrale ale formei  ,
, , Unde
, Unde  – numere.
– numere.
În acest caz, prin  denota
denota  și se aplică de două ori formula de integrare prin părți, revenind ca rezultat la integrala inițială, după care integrala inițială este exprimată din egalitate.
și se aplică de două ori formula de integrare prin părți, revenind ca rezultat la integrala inițială, după care integrala inițială este exprimată din egalitate.
cometariu: În unele cazuri, pentru a găsi o integrală dată, formula de integrare prin părți trebuie aplicată de mai multe ori. De asemenea, metoda integrării pe părți este combinată cu alte metode.
Exemplul 26.
Găsiți integrale folosind metoda după părți: a)  ; b)
; b)  .
.
Soluţie.
b) 
3.1.4. Integrarea Funcțiilor Fracționale-Raționale
Funcție rațională fracțională(fracția rațională) este o funcție egală cu raportul a două polinoame:  , Unde
, Unde  – polinom de grad
– polinom de grad  ,
, – polinom de grad
– polinom de grad
 .
.
Fracția rațională se numește corect, dacă gradul polinomului din numărător este mai mic decât gradul polinomului din numitor, i.e.  , în caz contrar (dacă
, în caz contrar (dacă  ) se numește fracție rațională gresit.
) se numește fracție rațională gresit.
Orice fracție rațională improprie poate fi reprezentată ca sumă a unui polinom  și o fracție rațională proprie prin împărțirea numărătorului la numitor conform regulii de împărțire a polinoamelor:
și o fracție rațională proprie prin împărțirea numărătorului la numitor conform regulii de împărțire a polinoamelor:
 ,
,
Unde  - întreaga parte din diviziune,
- întreaga parte din diviziune,  - fracția rațională adecvată,
- fracția rațională adecvată,  - restul diviziei.
- restul diviziei.
Fracții raționale proprii de forma:
eu.  ;
;
II.  ;
;
III.  ;
;
IV.  ,
,
Unde  ,
, ,
, ,
, ,
, ,
, ,
,
 – numere reale și
– numere reale și  (adică trinomul pătrat din numitorul fracțiilor III și IV nu are rădăcini - discriminantul este negativ) se numesc fracții raționale simple I, II, III și IV tipuri.
(adică trinomul pătrat din numitorul fracțiilor III și IV nu are rădăcini - discriminantul este negativ) se numesc fracții raționale simple I, II, III și IV tipuri.
Integrarea fracțiilor simple
Integralele celor mai simple fracții din patru tipuri se calculează după cum urmează.
eu)  .
.
II),  .
.
III) Pentru integrare cea mai simplă fracție Tip III, selectați un pătrat complet la numitor și înlocuiți  . După înlocuire, integrala este împărțită în două integrale. Prima integrală se calculează prin izolarea derivatei numitorului în numărător, care dă o integrală tabelară, iar a doua integrală este convertită la forma
. După înlocuire, integrala este împărțită în două integrale. Prima integrală se calculează prin izolarea derivatei numitorului în numărător, care dă o integrală tabelară, iar a doua integrală este convertită la forma  , deoarece
, deoarece  , care dă și integrala tabelară.
, care dă și integrala tabelară.


 ;
;
IV) Pentru a integra cea mai simplă fracție de tip IV, selectați un pătrat complet la numitor și înlocuiți  . După înlocuire, integrala este împărțită în două integrale. Prima integrală se calculează prin substituție
. După înlocuire, integrala este împărțită în două integrale. Prima integrală se calculează prin substituție  , iar al doilea folosind relații de recurență.
, iar al doilea folosind relații de recurență.
Exemplul 27.
Găsiți integrale ale fracțiilor simple:
A)  ; b)
; b)  ; V)
; V)  .
.
Soluţie.
A)  .
.
Orice fracție rațională proprie al cărei numitor poate fi factorizat poate fi reprezentată ca o sumă de fracții simple. Descompunerea în suma fracțiilor simple se realizează folosind metoda coeficienților nedeterminați. Este după cum urmează:
 corespunde unei fracții din formă
corespunde unei fracții din formă  ;
;
– fiecare factor al numitorului  corespunde sumei
corespunde sumei  fracții ale formei
fracții ale formei
 corespunde unei fracțiuni din formă
corespunde unei fracțiuni din formă  ;
;
– fiecare factor pătrat al numitorului  corespunde sumei
corespunde sumei  fracții ale formei
fracții ale formei
unde sunt coeficienții nedeterminați.
Pentru a găsi coeficienți nedeterminați, partea dreaptă sub forma unei sume de fracții simple este adusă la un numitor comun și transformată. Rezultatul este o fracție cu același numitor ca în partea stângă a ecuației. Apoi numitorii sunt aruncați și numărătorii sunt egalați. Rezultatul este o egalitate identică în care partea stângă este un polinom cu coeficienți cunoscuți, iar partea dreaptă este un polinom cu coeficienți necunoscuți.
Există două moduri de a determina coeficienți necunoscuți: metoda coeficienților necunoscuți și metoda valorilor parțiale.
Metoda coeficienților nedeterminați.
Deoarece polinoamele sunt identic egale, atunci coeficienții la aceleași puteri sunt egali  . Echivalarea coeficienților la aceleași grade
. Echivalarea coeficienților la aceleași grade  in polinoamele laturilor stanga si dreapta, obtinem sistemul ecuatii lineare. La rezolvarea sistemului, determinăm coeficienții incerti.
in polinoamele laturilor stanga si dreapta, obtinem sistemul ecuatii lineare. La rezolvarea sistemului, determinăm coeficienții incerti.
Metoda valorilor private.
Deoarece polinoamele sunt identic egale, apoi, substituind  în stânga și în dreapta oricărui număr, obținem o egalitate adevărată, liniară în raport cu coeficienții necunoscuți. Înlocuind atâtea valori
în stânga și în dreapta oricărui număr, obținem o egalitate adevărată, liniară în raport cu coeficienții necunoscuți. Înlocuind atâtea valori  , câți coeficienți necunoscuți există, obținem un sistem de ecuații liniare. În loc de
, câți coeficienți necunoscuți există, obținem un sistem de ecuații liniare. În loc de  Puteți înlocui orice numere în părțile din stânga și din dreapta, dar este mai convenabil să înlocuiți rădăcinile numitorilor fracțiilor.
Puteți înlocui orice numere în părțile din stânga și din dreapta, dar este mai convenabil să înlocuiți rădăcinile numitorilor fracțiilor.
După găsirea valorilor coeficienților necunoscuți, fracția inițială se scrie ca o sumă de fracții simple în integrand și se realizează integrarea discutată anterior asupra fiecărei fracții simple.
Schema de integrare fracții raționale:
1. Dacă integrandul este impropriu, atunci este necesar să-l prezentăm ca sumă a unui polinom și a unei fracții raționale adecvate (adică, împărțiți polinomul numărătorului la polinomul numitorului cu rest). Dacă integrandul este corect, trecem imediat la al doilea punct al diagramei.
2. Factorizați numitorul unei fracții raționale adecvate, dacă este posibil.
3. Descompuneți o fracție rațională proprie în suma fracțiilor raționale simple folosind metoda coeficienților nedeterminați.
4. Integrați suma rezultată a fracțiilor polinom și simple.
Exemplul 28.
Găsiți integrale ale fracțiilor raționale:
A)  ; b)
; b)  ; V)
; V)  .
.
Soluţie.
A)  .
.
Deoarece integrandul este o fracție rațională improprie, apoi selectăm întreaga parte, adică Să ne imaginăm ca fiind suma unui polinom și a unei fracții raționale propriu-zise. Împărțiți polinomul din numărător la polinomul din numitor folosind un colț.
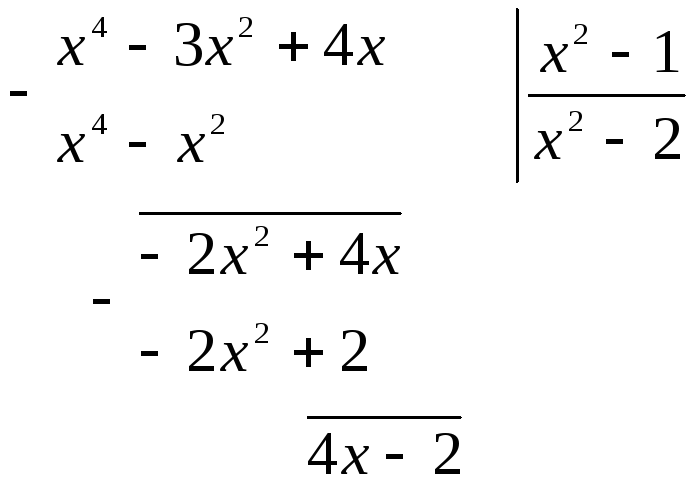
Integrala originală va lua forma:  .
.
Să descompunăm o fracție rațională proprie într-o sumă de fracții simple folosind metoda coeficienților nedeterminați:
 , primim:
, primim:




Rezolvând sistemul de ecuații liniare, obținem valorile coeficienților nesiguri: A = 1; ÎN = 3.
Apoi, expansiunea necesară are forma:  .
.
= .
.
b)  .
.
 .
.
Să aruncăm numitorii și să echivalăm părțile stânga și dreapta:
Echivalarea coeficienților la aceleași grade  , obținem sistemul:
, obținem sistemul:









Rezolvând un sistem de cinci ecuații liniare, găsim coeficienții nedeterminați:
 .
.
Să găsim integrala originală, ținând cont de expansiunea rezultată:

 .
.
V)  .
.
Să extindem integrandul (fracția rațională proprie) într-o sumă de fracții simple folosind metoda coeficienților nedeterminați. Căutăm descompunerea sub forma:
 .
.
Reducând la un numitor comun, obținem:
Să aruncăm numitorii și să echivalăm părțile stânga și dreapta:
Pentru a găsi coeficienți nesiguri, aplicăm metoda valorii parțiale. Să adăugăm  valori parțiale, la care factorii dispar, adică substituim aceste valori în ultima expresie și obținem trei ecuații:
valori parțiale, la care factorii dispar, adică substituim aceste valori în ultima expresie și obținem trei ecuații:

 ;
;  ;
;

 ;
;  ;
;

 ;
;  .
.
Apoi, expansiunea necesară are forma:
Să găsim integrala originală, ținând cont de expansiunea rezultată:

Ce este integrarea pe părți? Pentru a stăpâni acest tip de integrare, să ne amintim mai întâi derivata unui produs:
$((\left(f\cdot g \right))^(\prime ))=(f)"\cdot g+f\cdot (g)"$
Apare întrebarea: ce legătură au integralele cu asta? Acum să integrăm ambele părți ale acestei ecuații. Deci hai sa o scriem:
$\int(((\left(f\cdot g \right))^(\prime ))\text(d)x=)\int((f)"\cdot g\,\text(d)x+\ int(f\cdot (g)"\,\text(d)x))$
Dar ce este un antiderivat al unui accident vascular cerebral? Este doar funcția în sine, care se află în interiorul cursei. Deci hai sa o scriem:
$f\cdot g=\int((f)"\cdot g\,\text(d)x+\int(f\cdot (g)"\,\text(d)x))$
ÎN ecuația dată Propun să exprim termenul. Avem:
$\int((f)"\cdot g\,\text(d)x=f\cdot g-\int(f\cdot (g)"\,\text(d)x))$
Asta e formula de integrare prin părți. Astfel, schimbăm în esență derivata și funcția. Dacă inițial am avut o integrală a unui accident vascular cerebral înmulțit cu ceva, atunci obținem o integrală a unui lucru nou înmulțit cu un accident vascular cerebral. Asta-i toată regula. La prima vedere, această formulă poate părea complicată și lipsită de sens, dar, de fapt, poate simplifica foarte mult calculele. Să vedem.
Exemple de calcule integrale
Problema 1. Calculați:
\[\int(\ln x\,\text(d)x)\]\[\]
Să rescriem expresia adăugând 1 înainte de logaritm:
\[\int(\ln x\,\text(d)x)=\int(1\cdot \ln x\,\text(d)x)\]
Avem dreptul să facem acest lucru deoarece nici numărul, nici funcția nu se vor schimba. Acum să comparăm această expresie cu ceea ce este scris în formula noastră. Rolul lui $(f)"$ este 1, deci scriem:
$\begin(align)& (f)"=1\Rightarrow f=x \\& g=\ln x\Rightarrow (g)"=\frac(1)(x) \\\end(align)$
Toate aceste funcții sunt în tabele. Acum că am descris toate elementele care sunt incluse în expresia noastră, vom rescrie această integrală folosind formula de integrare pe părți:
\[\begin(align)& \int(1\cdot \ln x\,\text(d)x)=x\ln x-\int(x\cdot \frac(1)(x)\text(d) )x)=x\ln x-\int(\text(d)x)= \\& =x\ln x-x+C=x\left(\ln x-1 \right)+C \\\ sfârşitul (alinierea)\]
Gata, integrala a fost gasita.
Problema 2. Calculați:
$\int(x((\text(e))^(-x))\,\text(d)x=\int(x\cdot ((e)^(-x))\,\text(d )x))$
Dacă luăm $x$ drept derivată, din care acum trebuie să găsim antiderivată, vom obține $((x)^(2))$, iar expresia finală va conține $((x)^(2) )( (\text(e))^(-x))$.
Evident, problema nu este simplificată, așa că schimbăm factorii sub semnul integral:
$\int(x\cdot ((\text(e))^(-x))\,\text(d)x)=\int(((\text(e))^(-x))\cdot x\,\text(d)x)$
Acum să introducem notația:
$(f)"=((\text(e))^(-x))\Rightarrow f=\int(((\text(e))^(-x))\,\text(d)x) =-((\text(e))^(-x))$
Să diferențiem $((\text(e))^(-x))$:
$((\left(((\text(e))^(-x)) \right))^(\prime ))=((\text(e))^(-x))\cdot ((\ stânga(-x \right))^(\prime ))=-((\text(e))^(-x))$
Cu alte cuvinte, se adaugă mai întâi minusul și apoi se integrează ambele părți:
\[\begin(align)& ((\left(((\text(e))^(-x)) \right))^(\prime ))=-((\text(e))^(- x))\Rightarrow ((\text(e))^(-x))=-((\left(((\text(e))^(-x)) \right))^(\prime )) \\& \int(((\text(e))^(-x))\,\text(d)x)=-\int(((\left(((\text(e)))^(- x)) \right))^(\prime ))\text(d)x)=-((\text(e))^(-x))+C \\\end(align)\]
Acum să ne uităm la funcția $g$:
$g=x\Săgeată la dreapta (g)"=1$
Calculăm integrala:
$\begin(align)& \int(((\text(e))^(-x))\cdot x\,\text(d)x)=x\cdot \left(-((\text(e) ))^(-x)) \right)-\int(\left(-((\text(e))^(-x)) \right)\cdot 1\cdot \text(d)x)= \ \& =-x((\text(e))^(-x))+\int(((\text(e))^(-x))\,\text(d)x)=-x( (\text(e))^(-x))-((\text(e))^(-x))+C=-((\text(e))^(-x))\left(x +1 \right)+C \\\end(align)$
Deci, am efectuat a doua integrare pe părți.
Problema 3. Calculați:
$\int(x\cos 3x\,\text(d)x)$
În acest caz, ce ar trebui să luăm pentru $(f)"$ și ce pentru $g$? Dacă $x$ acționează ca o derivată, atunci în timpul integrării vom obține $\frac(((x)^(2)) )(2 )$, iar primul nostru factor nu va dispărea nicăieri - va fi $\frac(((x)^(2)))(2)\cdot \cos 3x$. Prin urmare, să schimbăm din nou factorii:
$\begin(align)& \int(x\cos 3x\,\text(d)x)=\int(\cos 3x\cdot x\,\text(d)x) \\& (f)"= \cos 3x\Rightarrow f=\int(\cos 3x\,\text(d)x)=\frac(\sin 3x)(3) \\& g=x\Rightarrow (g)"=1 \\\ sfârşitul(alinierea)$
Ne rescriem expresia originală și o extindem conform formulei de integrare pe părți:
\[\begin(align)& \int(\cos 3x\cdot x\ \text(d)x)=\frac(\sin 3x)(3)\cdot x-\int(\frac(\sin 3x) (3)\text(d)x)= \\& =\frac(x\sin 3x)(3)-\frac(1)(3)\int(\sin 3x\,\text(d)x) =\frac(x\sin 3x)(3)+\frac(\cos 3x)(9)+C \\\end(align)\]
Gata, a treia problemă este rezolvată.
În concluzie, să aruncăm o altă privire formula de integrare prin părți. Cum alegem care factor va fi derivata și care va fi funcția reală? Există un singur criteriu aici: elementul pe care îl vom diferenția trebuie fie să dea o expresie „frumoasă”, care apoi va fi redusă, fie să dispară cu totul în timpul diferențierii. Aceasta încheie lecția.
Anterior noi funcţie dată, ghidat de diverse formule și reguli, și-a găsit derivatul. Derivatul are numeroase întrebuințări: este viteza de mișcare (sau, mai general, viteza oricărui proces); coeficientul unghiular al tangentei la graficul funcției; folosind derivata, puteți examina o funcție pentru monotonitate și extreme; ajută la rezolvarea problemelor de optimizare.
Dar, alături de problema găsirii vitezei după o lege cunoscută a mișcării, există și o problemă inversă - problema restabilirii legii mișcării după o viteză cunoscută. Să luăm în considerare una dintre aceste probleme.
Exemplul 1. Un punct material se deplasează în linie dreaptă, viteza sa la momentul t este dată de formula v=gt. Găsiți legea mișcării.
Soluţie. Fie s = s(t) legea de mișcare dorită. Se știe că s"(t) = v(t). Aceasta înseamnă că pentru a rezolva problema trebuie să selectați o funcție s = s(t), a cărei derivată este egală cu gt. Nu este greu de ghicit că \(s(t) = \frac(gt^ 2)(2) \).De fapt
\(s"(t) = \left(\frac(gt^2)(2) \right)" = \frac(g)(2)(t^2)" = \frac(g)(2) \ cdot 2t = gt\)
Răspuns: \(s(t) = \frac(gt^2)(2) \)
Să observăm imediat că exemplul este rezolvat corect, dar incomplet. Se obține \(s(t) = \frac(gt^2)(2) \). De fapt, problema are infinit de soluții: orice funcție de forma \(s(t) = \frac(gt^2)(2) + C\), unde C este o constantă arbitrară, poate servi drept lege a mișcare, deoarece \(\left (\frac(gt^2)(2) +C \right)" = gt \)
Pentru a face problema mai specifică, a trebuit să remediem situația inițială: să indicăm coordonatele unui punct în mișcare la un moment dat în timp, de exemplu la t = 0. Dacă, de exemplu, s(0) = s 0, atunci din egalitatea s(t) = (gt 2)/2 + C obținem: s(0) = 0 + C, adică C = s 0. Acum legea mișcării este definită în mod unic: s(t) = (gt 2)/2 + s 0.
În matematică, se atribuie operații reciproce nume diferite, veniți cu notații speciale, de exemplu: pătrarea (x 2) și extragerea rădăcină pătrată(\(\sqrt(x) \)), sinus (sin x) și arcsinus (arcsin x), etc. Procesul de găsire a derivatei unei anumite funcții se numește diferenţiere, iar operația inversă, adică procesul de găsire a unei funcții dintr-o derivată dată, este integrare.
Termenul „derivat” în sine poate fi justificat „în viața de zi cu zi”: funcția y = f(x) „produce” optiune noua y" = f"(x). Funcția y = f(x) acționează ca „părinte”, dar matematicienii, desigur, nu o numesc „părinte” sau „producător”; ei spun că este, în raport cu funcția y" = f"( x), imagine primară sau primitivă.
Definiție. Funcția y = F(x) se numește antiderivată pentru funcția y = f(x) pe intervalul X dacă egalitatea F"(x) = f(x) este valabilă pentru \(x \in X\)
În practică, intervalul X de obicei nu este specificat, dar este subînțeles (ca domeniul natural de definire al funcției).
Să dăm exemple.
1) Funcția y = x 2 este antiderivată pentru funcția y = 2x, deoarece pentru orice x egalitatea (x 2)" = 2x este adevărată
2) Funcția y = x 3 este antiderivată pentru funcția y = 3x 2, deoarece pentru orice x egalitatea (x 3)" = 3x 2 este adevărată
3) Funcția y = sin(x) este antiderivată pentru funcția y = cos(x), deoarece pentru orice x egalitatea (sin(x))" = cos(x) este adevărată
Atunci când se găsesc antiderivate, precum și derivate, se folosesc nu numai formule, ci și unele reguli. Ele sunt direct legate de regulile corespunzătoare pentru calcularea instrumentelor derivate.
Știm că derivata unei sume este egală cu suma derivatelor sale. Această regulă generează regula corespunzătoare pentru găsirea antiderivatelor.
Regula 1. Antiderivată a unei sume este egală cu suma antiderivatelor.
Știm că factorul constant poate fi scos din semnul derivatei. Această regulă generează regula corespunzătoare pentru găsirea antiderivatelor.
Regula 2. Dacă F(x) este o antiderivată pentru f(x), atunci kF(x) este o antiderivată pentru kf(x).
Teorema 1. Dacă y = F(x) este o antiderivată pentru funcția y = f(x), atunci antiderivată pentru funcția y = f(kx + m) este funcția \(y=\frac(1)(k)F (kx+m) \)
Teorema 2. Dacă y = F(x) este o antiderivată pentru funcția y = f(x) pe intervalul X, atunci funcția y = f(x) are infinit de antiderivate și toate au forma y = F(x) + C.
Metode de integrare
Metoda de înlocuire variabilă (metoda de înlocuire)
Metoda integrării prin substituție presupune introducerea unei noi variabile de integrare (adică substituția). În acest caz, integrala dată este redusă la o nouă integrală, care este tabelară sau reductibilă la aceasta. Metode comune nu există o selecție de substituții. Capacitatea de a determina corect substituția este dobândită prin practică.
Să fie necesar să se calculeze integrala \(\textstyle \int F(x)dx \). Să facem substituția \(x= \varphi(t) \) unde \(\varphi(t) \) este o funcție care are o derivată continuă.
Atunci \(dx = \varphi " (t) \cdot dt \) și pe baza proprietății de invarianță a formulei de integrare pentru integrala nedefinită, obținem formula de integrare prin substituție:
\(\int F(x) dx = \int F(\varphi(t)) \cdot \varphi " (t) dt \)
Integrarea expresiilor de forma \(\textstyle \int \sin^n x \cos^m x dx \)
Dacă m este impar, m > 0, atunci este mai convenabil să se facă substituția sin x = t.
Dacă n este impar, n > 0, atunci este mai convenabil să se facă substituția cos x = t.
Dacă n și m sunt pare, atunci este mai convenabil să se facă substituția tg x = t.
Integrare pe părți
Integrare pe părți - aplicând următoarea formulă pentru integrare:
\(\textstyle \int u \cdot dv = u \cdot v - \int v \cdot du \)
sau:
\(\textstyle \int u \cdot v" \cdot dx = u \cdot v - \int v \cdot u" \cdot dx \)
Tabel de integrale nedefinite (antiderivate) ale unor funcții
$$ \int 0 \cdot dx = C $$ $$ \int 1 \cdot dx = x+C $$ $$ \int x^n dx = \frac(x^(n+1))(n+1 ) +C \;\; (n \neq -1) $$ $$ \int \frac(1)(x) dx = \ln |x| +C $$ $$ \int e^x dx = e^x +C $$ $$ \int a^x dx = \frac(a^x)(\ln a) +C \;\; (a>0, \;\; a \neq 1) $$ $$ \int \cos x dx = \sin x +C $$ $$ \int \sin x dx = -\cos x +C $$ $ $ \int \frac(dx)(\cos^2 x) = \text(tg) x +C $$ $$ \int \frac(dx)(\sin^2 x) = -\text(ctg) x +C $$ $$ \int \frac(dx)(\sqrt(1-x^2)) = \text(arcsin) x +C $$ $$ \int \frac(dx)(1+x^2 ) = \text(arctg) x +C $$ $$ \int \text(ch) x dx = \text(sh) x +C $$ $$ \int \text(sh) x dx = \text(ch) ) x +C $$Formula de integrare prin părți arată astfel:
.
Metoda de integrare pe părți constă în aplicarea acestei formule. La aplicație practică Este de remarcat faptul că u și v sunt funcții ale variabilei de integrare. Fie ca variabila de integrare să fie desemnată ca x (simbolul după semnul diferențial d la sfârșitul notației integrale). Atunci u și v sunt funcții ale lui x: u(x) și v(x) .
Apoi
, .
Și formula pentru integrarea pe părți ia forma:
.
Adică, funcția integrand trebuie să fie compusă din produsul a două funcții:
,
dintre care unul notăm u: g(x) = u, iar pentru celălalt trebuie calculată integrala (mai precis, trebuie găsită antiderivată):
, atunci dv = f(x) dx .
În unele cazuri f(x) = 1
. Adică în integrală
,
putem pune g(x) = u, x = v .
rezumat
Deci, în aceasta metoda, formula de integrare prin părți merită reținută și aplicată în două forme:
;
.
Integrale calculate prin integrare pe părți
Integrale care conțin logaritmi și funcții trigonometrice inverse (hiperbolice).
Integrale care conțin logaritmi și funcții trigonometrice sau hiperbolice inverse sunt adesea integrate prin părți. În acest caz, partea care conține funcțiile logaritmice sau trigonometrice inverse (hiperbolice) se notează cu u, iar partea rămasă cu dv.
Iată exemple de astfel de integrale, care sunt calculate prin metoda integrării pe părți:
, , , , , , .
Integrale care conțin produsul unui polinom și sin x, cos x sau e x
Folosind formula de integrare prin părți, se găsesc integrale ale formei:
, , ,
unde P(x) este un polinom în x. La integrare, polinomul P(x) este notat cu u, iar e ax dx, cos ax dx sau sin ax dx- prin dv.
Iată exemple de astfel de integrale:
, , .
Exemple de calculare a integralelor folosind metoda integrării pe părți
Exemple de integrale care conțin logaritmi și funcții trigonometrice inverse
Exemplu
Calculați integrala:
Soluție detaliată
Aici integrandul conține un logaritm. Efectuarea de substituții
u = ln x,
dv = x 2 dx.
Apoi
,
.
Calculăm integrala rămasă:
.
Apoi
.
La sfârșitul calculelor, este necesar să se adauge constanta C, deoarece integrală nedefinită- acesta este setul tuturor primitivelor. Ar putea fi adăugat și în calcule intermediare, dar acest lucru ar aglomera calculele.
Soluție mai scurtă
Puteți prezenta soluția într-o versiune mai scurtă. Pentru a face acest lucru, nu trebuie să faceți substituții cu u și v, dar puteți grupa factorii și puteți aplica formula de integrare prin părți în a doua formă.
.Răspuns
Exemple de integrale care conțin produsul unui polinom și sin x, cos x sau ex
Exemplu
Calculați integrala:
.
Soluţie
Să introducem exponentul sub semnul diferențial:
e - x dx = - e - x d(-x) = - d(e - x).
Să integrăm pe părți.
.
Folosim și metoda integrării pe părți.
.
.
.
În sfârșit avem.